|
|
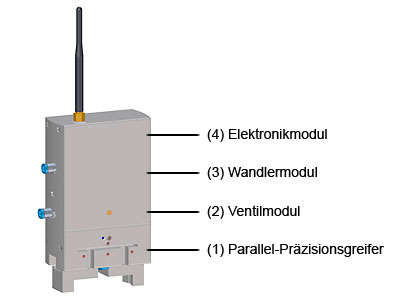
Monoenergetischer Greifer
Als quasiautonomer Aktor zur Adaption an eine Handlingseinheit, wurde ein
pneumatisch betriebener monoenergetischer Parallelgreifer entwickelt.
Dieser wird ebenfalls ausschließlich mit pneumatischer Energie versorgt und wandelt
diese vor Ort in die benötigte elektrische Energie.
Die Basis dieses Aktors bildet ein sogenannter Parallel- Präzisionsgreifer (1) mit
einem integrierten Positionsensor zur Endlagenabfrage der Greifbacken. Darüber befindet
sich das Ventilmodul (2), welches zum einen der Aktivierung der Generatoreinheit
dient und zum anderen, das Ventil zur Betätigung des Greifers enthält. Es
folgt ein Wandlermodul (3), welches die Luftmotor- Generator- Einheit
und eine Vorrichtung zur Justage ihres Arbeitspunktes beinhaltet.
Das Elektronikmodul (4) setzt sich aus dem Energiemanagement (inkl. Speicher)
und einem Funkmodul zusammen.
|
|
Parallel- Präzisionsgreifer (1)
Das Greifelement besteht aus zwei Greifbacken, welche über ein
Zahnstangen-Ritzel-System miteinander synchronisiert sind. Jede
Greifbacke verfügt über einen Hub von 2,5mm und bringt eine Greifkraft
von 58N (6 bar) auf. Bei wiederholten Greifvorgängen ist eine Genauigkeit des
Greifvorgangs mit eienr Toleranz von 0,015mm oder geringer erzielbar.
Der zugelassene Betriebsdruck liegt zwischen
5 und 8bar. Das System arbeitet pneumatisch einfachwirkend und mit
Federrückstellung. Die Positionserfassung der Greifbacken erfolgt
analog über ein Sensorelement auf Basis des magnetoresistiven Effektes.
Mit Hilfe softwaretechnisch teachbarer Komparatorlevel, lassen sich digitale
Schaltschwellen vorgeben, über welche eine einstellbare Endlagenabfrage
möglich wird.
|

|
Ventilmodul (2)
Die Betätigung des Greifers wird mit Hilfe eines 3/2- Ventils
realisiert. Zur Reduzierung der Leistungsaufnahme wurde zunächst
eine Haltestromabsenkung vorgesehen. Im nächsten Schritt wird ein
bistabiles Impulsventil integriert. Zur Aktivierung des Wandlers wird ein
pneumatisch vorgesteuertes 2/2-Membran-Impulsventil verwendet.
|
|
Wandlermodul (3)
Ähnlich wie in der monoenergetisch versorgten Ventilinsel wird auch hier die pneumatische
Arbeitsenergie zur dezentralen Bereitstellung der notwendigen elektrischen
genutzt.
Dazu dient ein Druckluftlamellenmotor als pneumatischer Antrieb. Die hierbei entstehende
mechanische Energie versetzt einen angekoppelten bürstenlosen AC-Generator in Rotation in dem
wiederum über elektromagnetische Induktion elektrische Energie erzeugt wird.
Die dabei entstehende 3-Phasen-Wechselspannung wird im Energiemanagement gleichgerichtet
und auf ein nutzbares Level transformiert.
|

|
Elektronikmodul (4)
Energiemanagement, Energiespeicher, Ventilendstufen und Funkeinheit sind in
einem Elektronikmodul zusammengefasst. Hier werden die Signale der
übergeordneten Steuerung empfangen und verarbeitet.
Ebenso werden Status- und Sensorsignale an die Steuerung versendet.
Das Funkmodul bildet auch hier die Kommunikationsschnittstelle zur
Basisstation. Bei dem implementierten Funkprotokoll handelt es sich um
das selbe proprietäre bidirektionale Funksystem auf 2,4GHz- Basis wie in der
monoenergetischen Ventilinsel.
|

|
|





