|
|
Positionssensoren
Zur Bestimmung des aktuellen Zustands von in einer Anlage verwendeten Komponenten
muss häufig eine Positionsermittlung erfolgen. Beispielsweise ist es notwendig,
über die Position der Greifbacken in einem Greifer zu detektieren, ob der
Greifer momentan geschlossen oder geöffnet ist und ob ein Objekt gegriffen wurde
oder nicht.
Eine zentrale Anforderung an einen energieautarken Wegsensor ist der möglichst geringe
Energiebedarf. Es zeigte sich, dass insbesondere die Detektion von Magnetfeldern,
beispielsweise durch induktive Sensoren, Hall-Sensoren oder MR-Sensoren bei geringer
Energieaufnahme zu guten Ergebnissen führen kann.
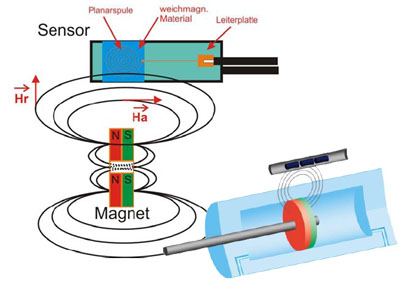
Das Prinzip der induktiven Positionsermittlung ist auf der rechten Seite dargestellt.
Eine Spule wird in Resonanz betrieben. Befindet sich in ihrer Nähe ein Permanentmagnet,
so verstimmt dieser abhängig von seiner Position die Resonanzfrequenz der Spule.
Diese Wechselwirkung kann elektronisch ausgewertet und in eine Positionsinformation
überführt werden.
Im Hallsensor wird ein stromdurchflossenes Hall-Element orthogonal in ein stationäres
Magnetfeld bewegt. Die Ablenkung der Stromflussrichtung im Hall-Element verursacht
eine positionsabhängige Ladungsverschiebung.
Das dritte Wirkprinzip, der sogenannte magnetoresistive Effekt wird in MR-Sensoren verwendet.
Der spezifische Widerstand von ferromagnetischen Materialien ist abhängig vom Winkel
zwischen Magnetfeldvektor und Stromvektor. Wird ein externes Magnetfeld dem Material angenähert,
so kann die Änderung des Widerstands über eine Messbrücke in eine Positionsinformation
überführt werden.
|
|
Im Vergleich zu den beiden bisher beschriebenen Verfahren ist die Empfindlichkeit
eines MR-Sensors relativ hoch und sein Stromverbrauch sehr gering. Daher wurden speziell
Sensoren dieser Bauart im EnAS-Projekt untersucht und praktisch eingesetzt.
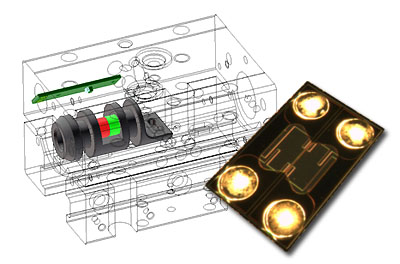
Das Bild auf der rechten Seite zeigt das Greifmodul des monoenergetischen Greifers.
Zur Positionsbestimmung der Greifbacken wurde ein magnetoresistiver Positionssensor
integriert (grüne Platine), der die Positionsänderungen des Permanentmagneten im
beweglichen Teil des Greifaktors erfasst.
|
|
|








